New Publication
Choose your own route – supporting pedestrian navigation without restricting the user to a predefined route
Cartography and Geographic Information Science
https://doi.org/
Haosheng Huang, Thomas Mathis and Robert Weibel
Abstract
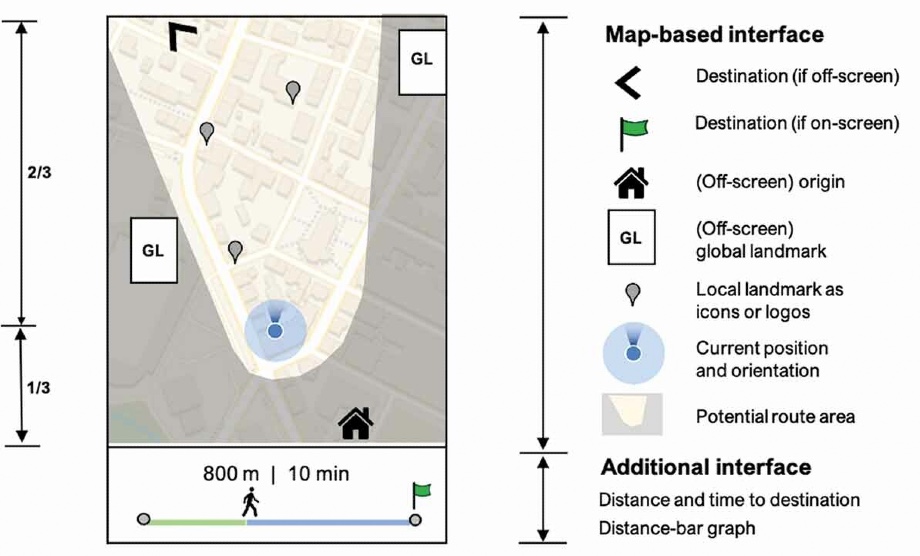
State-of-the-art mobile pedestrian navigation systems often employ GPS or other positioning methods for continuous tracking of users, and thus provide them with in-situ turn-by-turn route guidance along a desired route. However, studies have shown that user experience and acquisition of spatial knowledge decrease due to the “blind” following of such turn-by-turn navigation systems. This paper proposes a novel interface concept for mobile pedestrian navigation systems that provide navigation guidance without restricting the users to a predefined route. Specifically, the proposed novel user interface was based on the concept of the Potential Route Area (PRA), which defines a dynamic area consisting of all potential routes not longer than a certain detour the user is willing to accept. Within that area, the user can freely choose his/her own route and alter it anytime, and can still arrive at the destination within the desired detour tolerance. As a proof of concept, the proposed PRA-based system was then tested against a conventional turn-by-turn navigation system, represented by Google Maps, in a real-world navigation experiment, which revealed that the acquisition of spatial knowledge and user experience were substantially improved when using the PRA-based system. This can be explained by the fact that the PRA-based system provides its users with more freedom in choosing their own route.
https://doi.org/10.1080/15230406.2021.1983731